
ginetto said:Always is a good contribution give back to the community if somethig has been derived from the community => yes please")
Here you are:
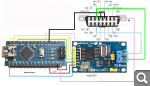
Sketch for Arduino IDE:
#include <SPI.h> //connect libraries
#include <mcp2515.h>
struct can_frame canMsg1;
struct can_frame canMsg2;
struct can_frame canMsg3;
MCP2515 mcp2515(10);
void setup() {
canMsg1.can_id = 0x681; //write commands to send here...
canMsg1.can_dlc = 8;
canMsg1.data[0] = 0x04;
canMsg1.data[1] = 0x10;
canMsg1.data[2] = 0x40;
canMsg1.data[3] = 0x0D;
canMsg1.data[4] = 0xAB;
canMsg1.data[5] = 0xFF;
canMsg1.data[6] = 0xFF;
canMsg1.data[7] = 0xFF;
canMsg2.can_id = 0x681;
canMsg2.can_dlc = 8;
canMsg2.data[0] = 0x04;
canMsg2.data[1] = 0x20;
canMsg2.data[2] = 0x40;
canMsg2.data[3] = 0x0D;
canMsg2.data[4] = 0xAB;
canMsg2.data[5] = 0xFF;
canMsg2.data[6] = 0xFF;
canMsg2.data[7] = 0xFF;
canMsg3.can_id = 0x681;
canMsg3.can_dlc = 8;
canMsg3.data[0] = 0x04;
canMsg3.data[1] = 0x30;
canMsg3.data[2] = 0x40;
canMsg3.data[3] = 0x0D;
canMsg3.data[4] = 0xAB;
canMsg3.data[5] = 0xFF;
canMsg3.data[6] = 0xFF;
canMsg3.data[7] = 0xFF;
while (!Serial);
Serial.begin(115200);
SPI.begin();
mcp2515.reset();
mcp2515.setBitrate (CAN_500KBPS, MCP_8MHZ); //check your quartz on mcp2515
mcp2515.setNormalMode();
Serial.println("Killing blue screen...");
}
void loop() {
delay(8000); //delay for starting vehicle 8s
mcp2515.sendMessage(&canMsg1);
Serial.println("Message 1 sent");
delay(100);
mcp2515.sendMessage(&canMsg2);
Serial.println("Message 2 sent");
delay(100);
mcp2515.sendMessage(&canMsg3);
Serial.println("Message 3 sent");
delay(100);
Serial.println("Blue screen was killed!");
while (true);
}